-
Par fr3d-nexus le 3 Février 2011 à 13:07Le shield est une carte permettant d'integrer les différents éléments éléctroniques dont est composé un multiwiicopter.
 Ce shield a la particularité d'etre "plug and fly" toutes les connnectiques et les options (et même plus) sont presentes de façon modulable pour faire fonctionner un multiwwicopter( version de ce jour 1.5 )Le schema original d'alexinparis :
Ce shield a la particularité d'etre "plug and fly" toutes les connnectiques et les options (et même plus) sont presentes de façon modulable pour faire fonctionner un multiwwicopter( version de ce jour 1.5 )Le schema original d'alexinparis :
Ce shema minimaliste mais très fonctionnel a été maintes fois repris avec succès. Personnellement j'ai preferé dévellopper mon propre shield répondant a mes attentes :
Personnellement j'ai preferé dévellopper mon propre shield répondant a mes attentes :- Pouvoir brancher facilement le recepteur dans l'ordre futaba : "Ailerons, Profondeur, Gaz, Derive, Mode autostable".
- D'être compatible pour tous les multiwiicopter : gimbal, tri, quad+, quadX, hex6,Y6. En effet si votre recepteur le permet il y'a moyen d'extraire le signal ppm et donc de liberer 2 prises de reception et de les allouer à deux moteurs.
- D'avoir une compatibilité parfaite sur le port i2c (fr3dllc integré), c-a-d que la communication bidirectionnelle se fait en respectant les voltages des 2 parties. Ceci nous permettra d'upgrader le multiwwicopter avec toutes sortes de gadgets fonctionnant en i2c 3.3v.(accéleromètre : bma020, baromètre : bma085 voir gps et magnétomètre)
- D'avoir une connectique i2c 5v disponible.
- Et enfin d'avoir une connectique pour la wmp, la tourelle fpv ( 2 servo autostabilisés en roll & nick ), le buzzer, l'accus.
 A paritr de là, plusieurs personnes m'ont demandé si je pouvais leur en procurer un, puis deux, puis etc... Donc j'ai lancé une petite production dans mon labo....Les branchements sont assez intuitifs, du moins je l'espère.Gardez à l'esprit que toutes fiches "type servo" que vous branchez sur cette carte.Son pôle négatif doit toujours être tourné vers l'exterieur de la carteA l'éxception du port wmp où le (-) est proche du centre.En gros tous vos fils noirs sont pointés vers l'extérieur de la carte.J'insiste parce lors d'un mauvais branchement vous risquez de griller votre électronique.Nous allons maintenant aborder comment monter votre fr3d-shield(pour ceux qui l'ont recu brut)
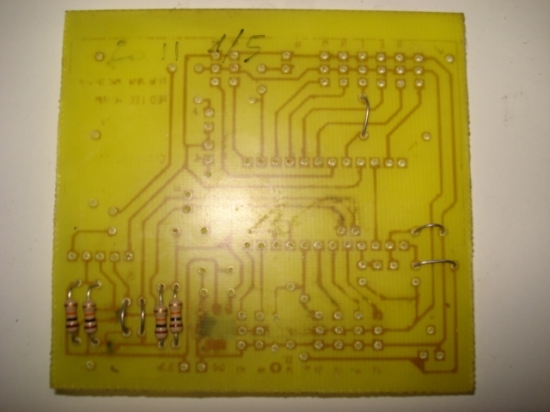
A paritr de là, plusieurs personnes m'ont demandé si je pouvais leur en procurer un, puis deux, puis etc... Donc j'ai lancé une petite production dans mon labo....Les branchements sont assez intuitifs, du moins je l'espère.Gardez à l'esprit que toutes fiches "type servo" que vous branchez sur cette carte.Son pôle négatif doit toujours être tourné vers l'exterieur de la carteA l'éxception du port wmp où le (-) est proche du centre.En gros tous vos fils noirs sont pointés vers l'extérieur de la carte.J'insiste parce lors d'un mauvais branchement vous risquez de griller votre électronique.Nous allons maintenant aborder comment monter votre fr3d-shield(pour ceux qui l'ont recu brut) 1. On place, puis on soude les 4 résistances identiques(10k,marron noir orange le sens n'a pas d'importance) dans la partie LLC.
1. On place, puis on soude les 4 résistances identiques(10k,marron noir orange le sens n'a pas d'importance) dans la partie LLC. 2.On coupe et on récupèrer 5 petites pattes. On place les 5 ponts.
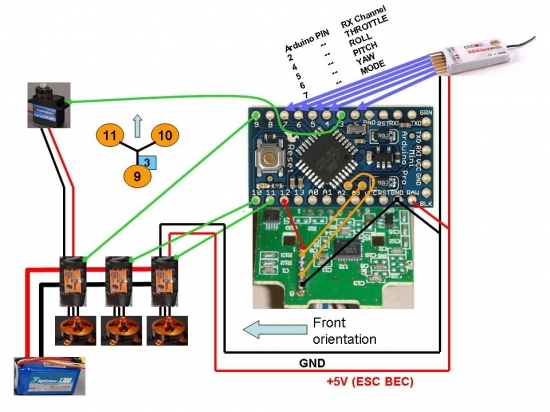
2.On coupe et on récupèrer 5 petites pattes. On place les 5 ponts. Sur la photo ci dessus l'arduino est alimenté depuis la prise accus, ( en bas a droite),le pôle négatif est la pin la plus en bas et la plus a droite.
Sur la photo ci dessus l'arduino est alimenté depuis la prise accus, ( en bas a droite),le pôle négatif est la pin la plus en bas et la plus a droite. Sur la photo ci dessus l'arduino est alimenté depuis l'un de vos ESC. Cest cette configuration qu'il faut appliquer.3. Placez et soudez les leds, veillez à bien respecter le positionnement des petites pattes des leds vers le centre de la carte.
Sur la photo ci dessus l'arduino est alimenté depuis l'un de vos ESC. Cest cette configuration qu'il faut appliquer.3. Placez et soudez les leds, veillez à bien respecter le positionnement des petites pattes des leds vers le centre de la carte.
4.On place et on soude les 2 résistances de 470 ohms ( jaune,violet,marron).
 5. On place et on soude la diode 1n4148 le petit trait noir coté wmp
5. On place et on soude la diode 1n4148 le petit trait noir coté wmp 6.On vérifie bien l'orientation du petit trait noir sur la diode et on place le pont pour le buzzer (optionnel). Cette diode bien que presente peut être omise, elle sert à reproduire le schema d'alexinparis pour diminuer la tension d'un composant externe.
6.On vérifie bien l'orientation du petit trait noir sur la diode et on place le pont pour le buzzer (optionnel). Cette diode bien que presente peut être omise, elle sert à reproduire le schema d'alexinparis pour diminuer la tension d'un composant externe. 7.On place les condensateurs pour le regulateur 3.3v veuillez faire attention au positionnement des pattes des condos notamment l'orange. Une erreur et les condensateurs exploseront à la mise sous tension.
7.On place les condensateurs pour le regulateur 3.3v veuillez faire attention au positionnement des pattes des condos notamment l'orange. Une erreur et les condensateurs exploseront à la mise sous tension. Il en va de même avec le condensateur bleu dont le trait noir (-) doit se placer comme sur la photo.Le condensateur jaune, quant à lui, comme les deux résistances du pont diviseur (optionnel), n'a pas de sens particulier. La résistance de 33K à gauche, celle de 56K à droite ( les valeurs des 3 VBATLEVEL devront être redéfinies 909,833,757 dans le programme d'alexinparis ).
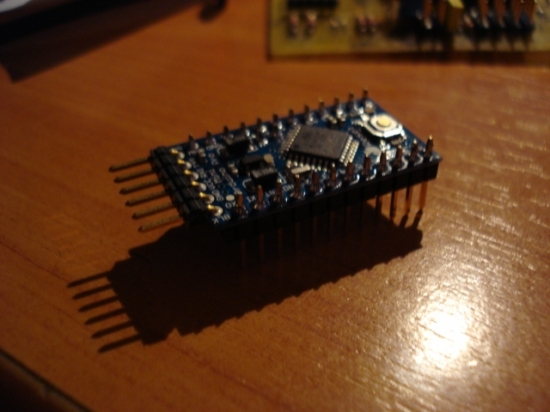
Il en va de même avec le condensateur bleu dont le trait noir (-) doit se placer comme sur la photo.Le condensateur jaune, quant à lui, comme les deux résistances du pont diviseur (optionnel), n'a pas de sens particulier. La résistance de 33K à gauche, celle de 56K à droite ( les valeurs des 3 VBATLEVEL devront être redéfinies 909,833,757 dans le programme d'alexinparis ). Voila vous n'avez plus qu'a souder vos pins mâles sur les emplacements moteurs (esc), recepteur, wmp, servo, accus et buzzer.Pour pouvoir extraire facilement votre adruino je vous conseille de souder des barettes femelles pour le support d'arduino sur la carte et de souder des pins mâles sur l'arduino.
Voila vous n'avez plus qu'a souder vos pins mâles sur les emplacements moteurs (esc), recepteur, wmp, servo, accus et buzzer.Pour pouvoir extraire facilement votre adruino je vous conseille de souder des barettes femelles pour le support d'arduino sur la carte et de souder des pins mâles sur l'arduino.
 Faites votre premier branchement sans l'arduino et vérifiez les voltages sur les hauts des résistances de 10k coté llc. Pour le couple de gauche la tension doit être ~3.3v et pour le couple de droite ~5v selon les esc.Concernant le branchement de l'électronique recepteur/esc, Il fautimpérativement ne garder qu'un seul fil rouge des esc vers le fr3dshield carte, ainsi il n'y aura pas de conflit pour l'alimentation de l'arduino et cela préservera vos controleurs.
Faites votre premier branchement sans l'arduino et vérifiez les voltages sur les hauts des résistances de 10k coté llc. Pour le couple de gauche la tension doit être ~3.3v et pour le couple de droite ~5v selon les esc.Concernant le branchement de l'électronique recepteur/esc, Il fautimpérativement ne garder qu'un seul fil rouge des esc vers le fr3dshield carte, ainsi il n'y aura pas de conflit pour l'alimentation de l'arduino et cela préservera vos controleurs.
Quant au récepteur vous pouvez utiliser des cables servos standard ou si vous êtez pointilleux sur le poids inutile vous pouvez ne garder qu'un fil complet (-,+,signal) et relier simplement le fil signal des autres voies.
Le SERLCD, l'écran de configuration LCD, doit etre alimenté avec un cable servo modifié car la connectique côté sparkfun est inversée. De plus il est impossible de charger une mise à jour si l'ecran LCD est branché. Toute opération avec le cable usb connecté implique de debrancher le LCD.
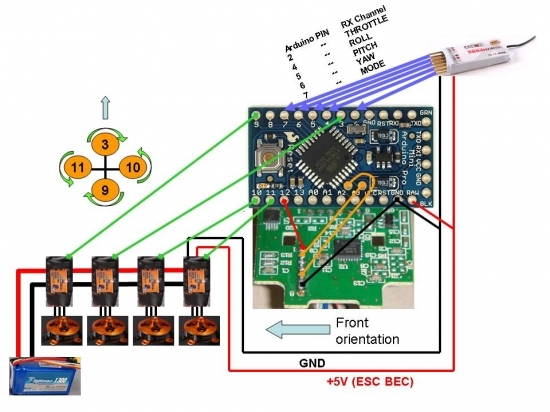
Sont presentées ici les connections moteurs selon le modèle :

 Ainsi le moteur 1 (M1 fr3d-shield) correspond :
Ainsi le moteur 1 (M1 fr3d-shield) correspond :- a la pin3 de l'arduino
- au moteur avant gauche sur un quadX
- au moteur avant sur un quad+
- au servo sur un trico...
Si l'emplacement des connecteurs moteurs(esc) ne vous convient pas vous pouvez les modifer logiciellement ainsi le moteur 4 pourra devenir sur un quadX le moteur avant gauche et non plus le moteur avant droit.
Voila j'espère que cette petite page vous a plu, et qu'elle a répondu à vos questions j'attends vos commentaires.nb:Les branchements pour faire voler un Hexa, et Y6 sont present, mais n'ont pas été testé.
 votre commentaire
votre commentaire Suivre le flux RSS des articles de cette rubrique Suivre le flux RSS des commentaires de cette rubrique
Suivre le flux RSS des articles de cette rubrique Suivre le flux RSS des commentaires de cette rubrique












|
|
|
|