-
Reglages du PiD(synthese de rcgroups)
compréhension réglages et mise en pratique du Proportionnel-Integral-Derivé (PiD).
Compréhension.
Quand l'orientation du multirotor change,quelque soit l'axe ; tangage, roulis, lacet, le gyro concernné indique un changement d'angle par rapport a sa position initiale.
Le micro-controlleur ( atmega328 ) du multirotor enregistre la position initiale et tout en utilisant une boucle de programme, il pilote en conséquence le ou les moteurs adéquats pour recouvrer sa position initiale.Simple non ??
Plus précisemment le PiD est une combinaison de la mesure de la deviation de l'angle, un échantillonnage du changement dans un temps donné et une prédiction de sa futur position. Tout ceci, bien melangé et trié, fourni assez d'informations au micro-controlleur( atmega328 ou arduino) pour piloter les moteurs afin de permettre au multiwwicopter de retourner à son état d'équilibre.
Réglages au sol.(nécesssite l'aide d'une trierce personne)
-> entrez les valeurs par défaut recommandé par l'auteur alexinparis en fonction de la version de votre multiwii on traitera ici les versions 1.6 et antérieures.
-> maintenez fermement le multirotor en l'air ( tenez le à deux mains au dessus de votre tête par le train d'atterrissage ou par les bras).
Faites super gaffe aux helices elles peuvent dangereusement vous couper-> armer les moteurs-> progrésssivement augmentez les gaz jusqu'au point dit de "vol stationnaire" le multirotor devient alors très léger.-> actionner chacun de vos manches de facon a a ce que le multirotor s'incline dans la direction souhaitée :
elles peuvent dangereusement vous couper-> armer les moteurs-> progrésssivement augmentez les gaz jusqu'au point dit de "vol stationnaire" le multirotor devient alors très léger.-> actionner chacun de vos manches de facon a a ce que le multirotor s'incline dans la direction souhaitée :
-pousser le manche aileron à droite, le multirotor s'incline à droite (vu de dos)-tirer le manche profondeur, le multirotor se lève de l'avant.-> Maintenant éssayez de pencher le multirotor dans une direction, vous devez sentir une réaction du multirotor qui contre la pression exercé.
-si vous le penchez vers l'avant alors il va essayer de se redresser, idem pour la droite.-> changez la valeur de "P" jusqu'a ce qu'il soit difficle d'incliner le multirotor.-> essayez maintenant de basculer le multirotor. Augmentez "P" jusqu'a ce que le multirotor oscille dès lors réduisez "P" de quelques crans.-> répétez l'opération pour tout les axes ROLL (roulis), PITCH (tangage) et YAW (lacet).Vos parametres dévraient maintenant convenir pour le parametrages en vol.
Réglages avancés - comprendre l'impact de P, I, et D."P" est le cumul des forces appliquées pour remettre le multirotor dans sa position initiale.
Cet ensemble de forces cumulées est proportionnel à une combinaison de la déviation de l'état initial
moins les commandes pour changer la direction depuis les ordres émis par la radiocommande.
un "P" élevé va produire une forte poussée pour contrer les changement de position.
Si la valeur de "P" est trop grande, lors du retour à la position initiale, le multirotor va la depasser et alors
une force opposé sera nécéssaire pour compenser. Cela produira un effet d'oscilliation jusqu'à, finalement,
devenir complèment instable ou beaucoup trop stable trop dur à bouger.--Augmenter la valeur de "P":
le multirotor deviendra plus stable jusqu'a ce que "P" soit trop grand alors le multirotor oscilliera jusqu'a
en perdre le controle.
Vous remarquerez une forte résistance à chaque tentative d'incliner le multirotor.--Diminuer la valeur de "P":
Tant que "P" est trop bas le multirotor va commencer à glisser/dévié il deviendra alors instable.
Il sera moins "resistant" à chaque tentative d'incliner le multirotor et sera donc plus vif.vol acrobatique : Nécessite un "P" légèrement plus élevé.
vol calme : Nécessite un "P" légèrèment moins élevé.
"I" est la période dans le temps pour laquelle le changement d'angle est échantillonné et moyenné.
Le total des forces appliqueés pour retourner à la position initiale est augmenté tant que la déviation/glissement
existe et ce, jusqu'à ce que la force maximum soit atteinte.
Une grande valeur de "I" va augmenter la capacité a garder sa position.--Augmenter la valeur de "I":
augmente la faculté de conserver par dessus tout la position initiale et réduit le glissement, la déviation
mais augmente aussi le delai pour retourner a la position initiale.
Diminue aussi l'importance de "P".
--Dininuer la valeur de "I":
Améliorer la réactivité aux changements, mais augmente le glissement et donc réduit la capacité a garder sa position.
Augmente l'importance de "P".
vol acrobatique : Nécessite un "I" légèrement plus bas
vol calme : Nécessite un "I" légèrement plus élevé."D" est la vitesse a laquelle le multirotor doit etre retourné à sa position originale.
Une valeur de "D" élevé ( c'est un chiffre négatif jusqu'a multiwii1.7 ) c-a-d proche de zero, signifie que l'on estime que le multirotor va retourner à sa position initiale trés rapidement.--Augmenter la valeur de "D" (se rapprocher de zero version < 1.7) :
Améliore la vitesse à laquelle les écarts/dévaitions sont récupérés
Avec une vitesse de récupération trop rapide vient une plus grande probabilité de dépassement et donc d'oscillations.
Permettra également d'accroître l'effet de "P".--Diminuer la valeur de "D" (s'éloigner de zero version < 1.7 ) :
Réduit les oscillations lors du retour des déviations par rapport à leur position initiale.
Le retour à la position initiale devient plus lent.
Diminue l'effet de "P".
Vol acrobatique : Augmentez "D" ( proche de zéro)
vol calme : Diminution "D" ( loin de zéro ) votre commentaire
votre commentaire
-
- Nouvel article ajouter pour le fr3d-llc, comment le tester.
- En cours de traduction une synthese de shikra pour le reglage du PiD....http://www.rcgroups.com/forums/showpost.php?p=17169869&postcount=1
- Devant la demande croissante de produits fr3d, je me demande si je ne vais pas passer par un professionnel pour la creation des pcb...
votre commentaire
-
Votre multiwii ne fonctionne pas (bien) ? la connection avec le gui ne se fait pas (pas de nunchuk ou wmp+ visible) ?
Vous avez de fortes présoptions sur le fr3d-llc ?
tres bien essayons d'y voir plus clair avec un simple voltmetre....;)
tout d'abord le fr3d-llc connecté a l'arduino la wmp+ non branché.
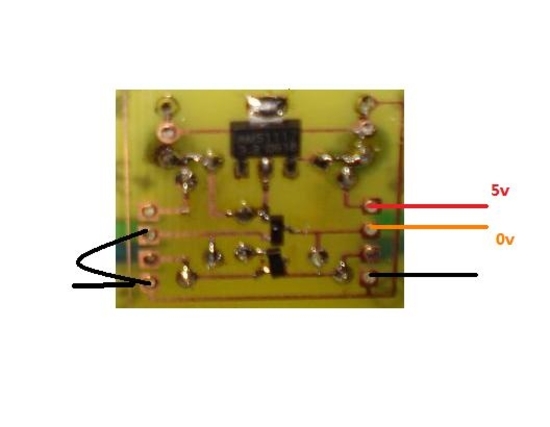
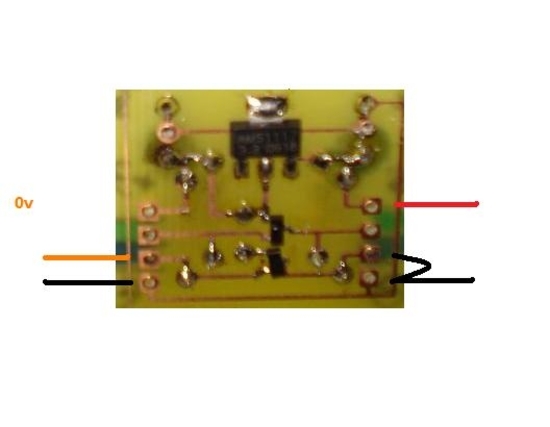
-1- verifiez que vous avez bien 5v dur 5vd12 (fils rouge sur 5vd12 et fils noir sur masse, voltremetre du 20volts).
Si rien n'apparait verfier vos connections ou votre voltmetre.
Si 3.3v apparait vous vous etez tromper de broche, vous etez sur 3.3v wmp+
-2- vous avez donc 5v sur 5vd12, verifier que vous avez 3.3v sur 3.3v wmp+
Si rien n'apparait verifier la continuité de la piste jusqu'a la pin du regulateur 3.3v, c'est la pin du milieu du "gros" composant noir. Prenez la mesure sur cette derniere. un petit peu d'etain sur la piste devrait resoudre le pb de continuité de piste.
Si vous n'avez pas 3.3v au mileu du regulateur, ce dernier est mort.

-3- tester le haut de chaque resistances verticales. vous devez avoir 5v sur le couple coté arduino et 3.3v coté wmp+
Ssi un des voltages est manquant verfier la continuité des pistes, éventuellment ajoutez de l'etain sur chaque piste.
-4- vous avez les bons voltages en entrée(5v arduino) et en sortie(3.3v vwmp+), prenez les mesures sur sda,scl coté arduino vous devez avoir 5v sur chaque De meme coté wmp+ mais avec 3.3v., si tel n'est pas le cas verfiez les continuités des pistes ou un des mosfet est naze.... :(
-5- Prenez un fils de shuntage. Denudé le des deux coté. Un bout sur une des masses l'autre sur sda coté ardu vous devez alors mesurer 0v sur sada coté wmp+ faites de meme en appliquant la masse coté wmp+ et mesurez coté ardu vous devriez avoir 0v avec le shunt et 5v sans le shunt. En effet l'effet pullup tire la tension vers le haut 5v coté ardu & 3.3v coté wmp+ faites de meme avec scl.

.
 votre commentaire
votre commentaire
-
Un nouveau fr3d-llc est à l'etude. Il sera composé entierement de composants cms pour une taille inferieur aux 20x20mm. Cela grace aux condensateurs au tantale et aux resistances en 0805 (2x1.25mm). le pcb va etre mini mini a souder je vais encore me bruler les doigts.
Par consequent la fr3d-shield sera quelques temps plus tard elle aussi modifiée. J'espere pouvoir descendre en dessous de 50x50mm !
votre commentaire
-
Mise a jour des images du fr3d-shield pour un branchement des moteurs en fonction de la configuration (tri, quad+, quadx).
Mise a jour branchement au recepteur et indication de la polarité des connectiques servo.
votre commentaire





|
|
|
|